


Bucaq mövqeyini (dönməsini) addımlar halında deyişdirən ,çox həssas siqnallarla sürülə bilən ( fırladılan) motorlara addım motorlar deyilir. Motora tətbiq edilən siqnalın tezliyi deyişdirilərək motorun sürəti deyişdirilə bilər. Bu siqnalların istiqaməti , yəni sırası deyişdirilərək motorun fırlanama istiqaməti deyişdirilə bilər.
Addım motorlarının hansı istiqamətə doğru dönəcəyi , dövr sayı , fırlanma sürəti kimi qiymətləri mikroprosessor və ya komputer ilə idarə edilə bilər. Nəticə olaraq addım motorların sürəti , dönmə istiqaməti və mövqeyi hər zaman bilinir.Bu həssasıqa görə addım motorları çox həssas yer nəzarəti olan yerlərdə istifadə olunur. Addım motorlarda Servo motorlar kimi birbaşa cərəyan verməklə işləmir. Step motorlar üçün xüsusi sürücü dövrələri olur. Sürücüyə komputerdən və mikrokontrollerdən gələn xüsusi siqnallarla motor idarə olunur.

– Addım motorların tətbiqləri.
Addım motorlar robot texnologiyalarında , dəzgahları ayarlamaq , yazıcılar , CNC maşınlar , 3D printerlər , lazer kesicilərdə və s. yerlərdə geniş istifadə olunur. Addım motorlar tibdə kart oxuyucularında , tikiş maşınlarında ,kameralarda da istifadə olunur.
– Addım motorların addım bucağının və addım sayısının hesablanması.
360 dönən step motorlarda addım bucağının ( s ) tapıması üçün faz sayını ( N s ) və motordaki rotorun çıxıntılı qütb sayını ( Nr ) bilmək lazımdır.


Addım sayını hesablanması
Bunun üçün bir addım bucağının tapılması kifayətdir.


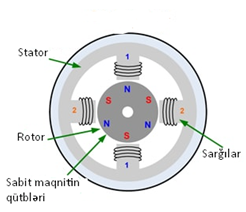
– Addım motorun quruluşu.
Addım motorun əsas hissələri stator və rotordan ibarətdir. Stator hissə çoxlu sayda cüt-cüt sarğaclardan ibarətdir. Statorun sarğaclarına növbəli şəkildə cərəyan verməklə rotor hərərkət etdirilir. Sarğaclara cərəryan verdikdə sarğaclarda maqnit sahəsi induksiyalanır və oda rotoru hərəkət elətdirir ( fırlatır ). Bu motorların bəzilərində hətta rotoru 1 dərəcə də hərəkət elətdirmək olur.
– Addım motorların quruluşlarına görə növləri.
1) Sabit maqnitli (PM).
2) Hibrit addım motorlar (HB).
3) Deyişkən relükstanslı addım motor.
4) Hidrovlik addım motor.
5) Lineer addım motor.
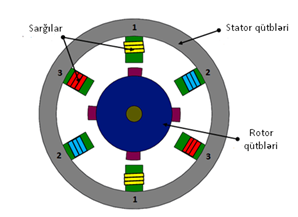
1) Sabit maqnitli addım motor.
Bu motorlarda rotor sabit maqnitlərdən ibarətdir. Stator bobinlərinə tətbiq olunan gərginliyə və cərəyanın istiqamətinə görə dönməsi baş verir.
Stator bobinlərindəki cərəyan ardıqca maqnit sahəsi və torkda ( güc , burucu moment ) artır. Motorun torku nə qədər çoxdursa motor o qədər çox yük qaldıra bilir. Sabit maqnitli addım motorlar deyişkən relükstanslı addım motorla nisbətən daha yüksək torklarla işləyir. Sabit maqnitli addım motorlarda dörd yerə ayrılırlar.

a) İki fazlı sabit maqnitli iki fazlı addım motorlar.
b) Orta uclu sarğılara malik maqnitli addım motorlar.
c) Disk tipli sabit maqnitli addım motorlar.
d) Dörd fazlı sabit maqnitli addım motorlar.
2) Hibrit addım motorlar.
Hibrit addım motorların rotoruları da sabit maqnitdən hazırlanır. Bu motorların hibrit adlandırılmasının səbəbi sabit maqnitli addım motorların və deyişkən relükanslı addım motorların birləşməsindən meydana gəlməsidir. Statorların nüvəsinin quruluşu deyişkən relükanslı addım motorlara çox oxşasa da onlardan daha fərqlidir. Bu motorların fırlanma sürəti və torku ( güc ) sabit maqnitli addım motorlardan daha yüksəkdir və yaxşı performans göstərir.

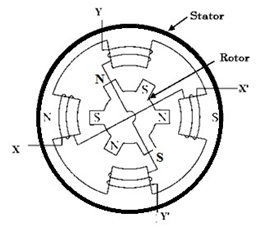
3) Deyişkən relükstanslı addım motorlar.
Sabit maqnitli addım motorlarda olduğu kimi bu motorlar da ən azı dörd statora malikdir. Bu motorlarda sabit maqnitlərdən deyil , maqnitlənə bilən çox qütblü materiallardan düzəldilmiş rotordan ibarətdir. Deyişən relükanslı addım motorların başlanğıc , durma və dönmə addımları sabit maqnitli addım motorlardan daha çevikdi. İki tip deyişkən relükanslı addım motor vardır.
a) Tek hisssəli deyişkən relükanslı addım motorlar.
b) Çox hissəli deyişkən relükanslı addım motorlar.

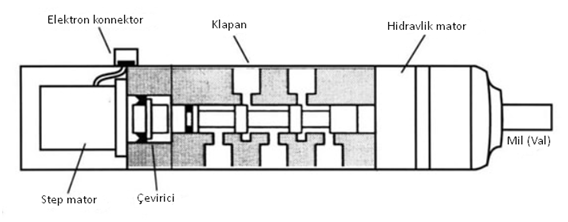
4) Hidrovlik addım motorlar.
Bu motorların həmdə elektro-hidrovlik addım motorlar adlandırılır. Hidravlik addım motor böyük gücü idarə etmək üçün kiçik elektrikli addım motor istifadə olunan cihazdır. Quruluşu :

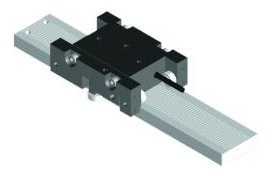
5) Lineer addım motorlar.
Dairəvi fırlanma hərəkəti deyil , üfüqi səthdə mexaniki hərəkət edən motorlara Lineer addım motorlar deyilir. Lineer step motorlarda da fırçalı və fırçasız sabit cərəyan (DC) motorlarında olduğu kimi reduktorlu step motor seçimi vardır.

– Reduktorlu addım motorlar.
Dövrlərin sayının çox olması deyil , yüksək torka ehtiyac olan yerlərdə (tətbiqlərdə ) reduktorlu addım motorlardan istifadə olunur. Addım motorun milinə ( valına ) bağlanan dişli çarx seti sayəsində misal üçün sürətini 30 dan 1 ə qədər azaltdaraq çıxışdaki torku ( burucu momenti , gücü ) 30 dəfə çox artırmaq olar.


– Addım motorların üstünlükləri .
1) Addım motorların rotorunun bucağ sürəti yetərincə kiçik olduğundan rotorun dönməsi zamanı addım itirilməsi olmaz. Yəni dəqiq bucağ məsafəsi tamamlanarsa motorun dönməsi uyğun sayda addımla idarə edilə bilər.
2) Addım motorlar yükə lazım olan momenti verə bilər.
3) Addım motorların sabit gərginliklə ( DC ) xəbardar etmədə geniş tutma momentinə sahibdir. Yəni addım motorların rotorunun hərəkəti sabitkən avtomatik açarlama ( tormozlama ) özəlliyi vardır.
4) Addım motorlarda səhf sadəcə addımda səhf ola bilər. Adətən addım başına 1 – 5 % arasında deyişir.
5) Mator quruluşu bəsit olduğu üçün matorun baxımı rahat və istifadə müddəti çoxdur.
6) Addım motorların qızmasına görə gələn zərərlər azdır.
7) Motor gərginlik mənbəyi və addım motor sürücü dövrəsi ilə idarə olunur.
8) Motorun sürəti proqramlaşdırma üsülü ilə tənzimlənə bilər. İşləmə müddəti ərzində sürət sabit qalır , deyişmir.
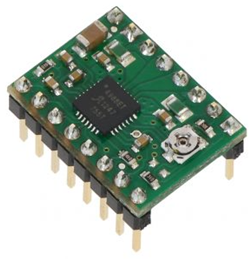
– Addım motor sürücü dövrəsi.
Addım motorlar çox yüksək sürətlə açıb qapaya bilən motor sürücülərlə və motor kontrol ( idarə etmə ) kartları ilə idarə edilir. Bu motor sürücülərə qoşulu olduğda enkoder və mikrokontrollerdən PWM ( Pulse Width Modulation , Eninə impuls modulyasiyası ( EİM)) siqnalları alır. Alınan hər bir siqnal istifadə olunaraq motorun addım atmasına səbəb olur. Addım motorlar üçün A4988 Motor sürücü kartı :

Müəllif : Xəyal Əliyev.